【概述】
在实现 K 近邻时,主要考虑的是如何对训练数据进行 K 近邻搜索,最简单的实现方式是线性扫描(Linear Scan),此时要计算输入样本与每一个训练样本的距离,这在维度大的特征空间以及大容量的训练数据集中非常耗时
为提高 K 近邻搜索的效率,可以使用特殊的数据结构来存储训练数据,通过以空间换时间来快速查询样本的近邻
KD 树(K-Dimensional Tree)利用树结构在 $k$ 维空间上为数据集建立索引,其建立思想如同分治法,即利用已有数据对 $k$ 维空间进行切分
具体来说,KD 树表示了对 $k$ 维空间的一个划分(Partition),构造 KD 树相当于不断利用垂直于坐标轴的超平面将 $k$ 维空间切分,从而构成一系列的 $k$ 维超矩形区域,这样一来,树上的每一个点都对应于一个 $k$ 维超矩形区域
同时,由于 KD 树是二叉树结构,其时间复杂度上是 $O(\log n)$,相较于线性扫描的 $O(n)$ 的复杂度,有了极大的提高
此外,若在使用 sklearn 的 KNeighborsClassifier() 方法时,想利用 KD 树作为数据结构,在该方法参数中加入 algorithm='kd_tree' 即可
1 | model = KNeighborsClassifier(n_neighbors=k, p=2, metric='minkowski', algorithm='kd_tree') |
【KD 树的构造】
基本思想
构造 KD 树的基本思想是如下:先构造根结点,使根结点对应于 $k$ 维空间中包含所有样本的超矩形区域,之后对 $k$ 维空间进行递归切分,以生成子结点,每个子结点对应一个切分后的子超矩形区域,直到子区域内没有样本时终止切分,在迭代过程中,样本将被保存到相应的结点上
递归切分的方法是在超矩形区域上选择一个坐标轴,并在坐标轴上选择一个切分点,通过切分点来确定一个超平面,这个超平面通过选定的切分点,同时垂直于选定的坐标轴,此时,当前超矩形区域被切分为左右两个子超矩形区域
通常,依次选择坐标轴对空间进行切分,选择训练样本点在选定的坐标轴上的中位数作为切分点,此时得到的 KD 树,是一个平衡二叉树
算法流程
对于给定的数据集 $T=\{\mathbf{x_1},\mathbf{x_2},…,\mathbf{x_n}\}$,第 $i$ 组样本中的输入 $\mathbf{x_i}$ 具有 $m$ 个特征值,即:$\mathbf{x_i} =(x_i^{(1)},x_i^{(2)},…,x_i^{(m)})\in \mathbb{R}^m$
构造 KD 树的算法流程如下:
Step 1:构造根结点,其对应于包含 $T$ 的样本输入 $\mathbf{x_i}$ 的 $m$ 维空间的超矩形区域,并进行切分,切分由通过切分点且与坐标轴 $x^{(1)}$ 垂直的超平面实现
1)选择 $x^{(1)}$ 作为切分的坐标轴,以 $T$ 中所有实例的 $x^{(1)}$ 坐标的中位数为切分点,将根结点对应的超矩形区域切分为两个子区域
2)对于由根结点生成的深度为 $1$ 的左、右子结点:左子结点对应坐标 $x^{(1)}$ 小于切分点的子区域,右子结点对应坐标 $x^{(1)}$ 大于切分点的子区域
3)将落在切分超平面上的实例点,保存在根结点
Step 2:对于深度为 $j$ 的结点,进行迭代切分,切分由通过切分点且与坐标轴 $x^{(l)}$ 垂直的超平面实现
1)选择 $x^{(l)}$ 作为切分的坐标轴,$l=j\:(mod\:\:k)+1$,以该结点的区域中的所有实例 $x^{(l)}$ 坐标的中位数为切分点,将该结点对应的超矩形区域切分为两个子区域
2)对于由该结点生成的深度为 $j+1$ 的左、右子结点:左子结点对应坐标 $x^{(l)}$ 小于切分点的子区域,右子结点对应坐标 $x^{(l)}$ 大于切分点的子区域
3)将落在切分超平面上的实例点,保存在该结点
Step 3:重复 Step 2,直到两个子区域没有实例存在时停止,此时即形成 KD 树的区域划分
实例
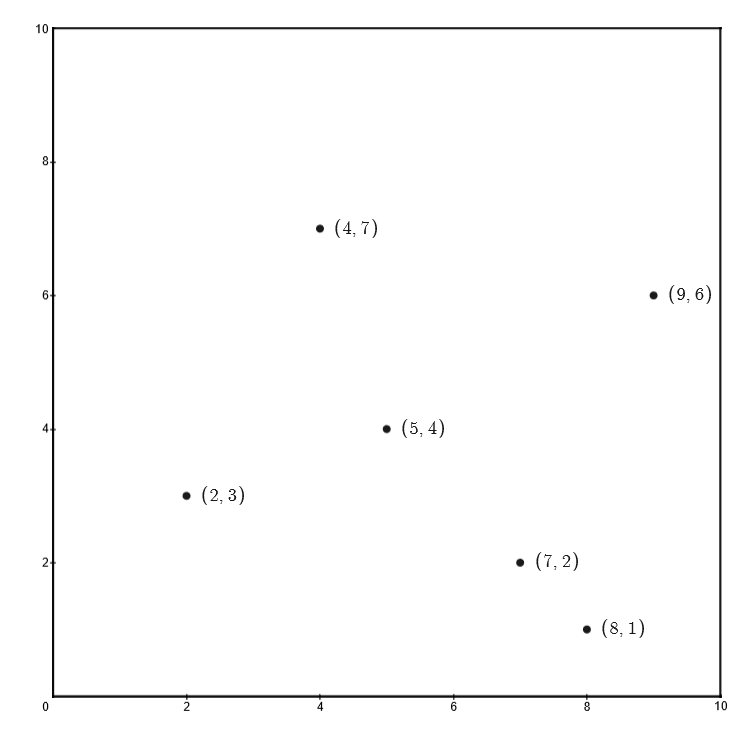
给定一个输入 $\mathbf{x}$ 为二维的数据集 $T=\{(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)\}$
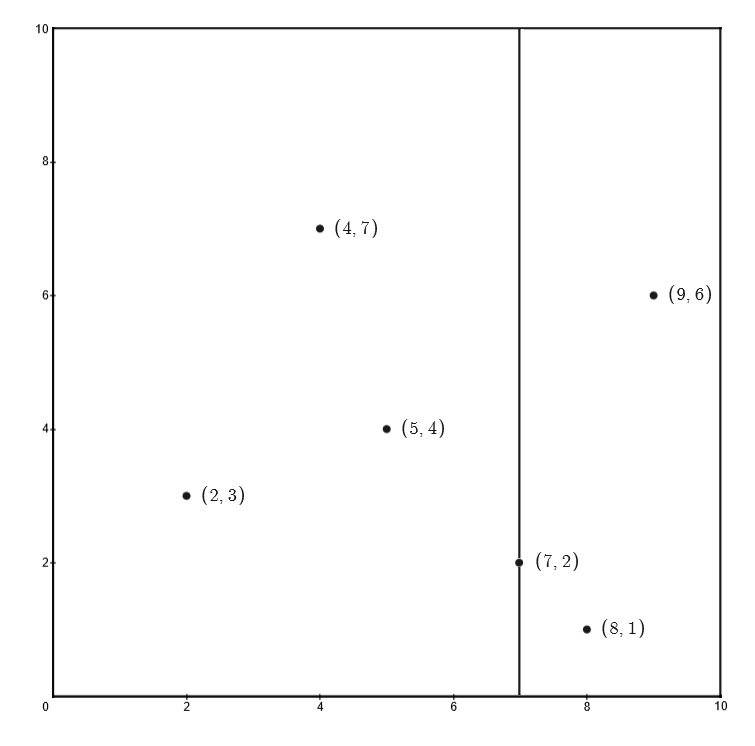
首先构造根结点,选择 $x^{(1)}$ 轴,$6$ 个数据点的 $x^{(1)}$ 坐标的中位数为:$7$,此时以平面 $x^{(1)}=7$ 将空间划分为左、右两个子矩形
接着,左矩形以 $x^{(2)}=4$ 划分为两个子矩形,右矩形以 $x^{(2)}=6$ 划分为两个子矩形
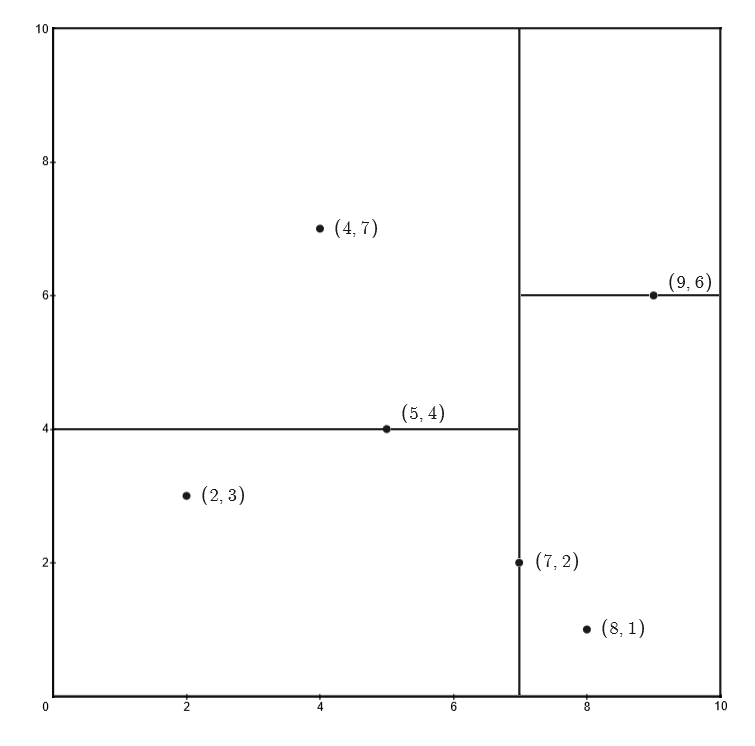
之后,对划分出的 $4$ 个子矩形递归的进行划分,对于左上矩形,以 $x^{(1)}=4$ 划分为两个子矩形;对于左下矩形,以 $x^{(1)}=2$ 划分为两个子矩形;对于右下矩形,以 $x^{(1)}=8$ 划分为两个子矩形
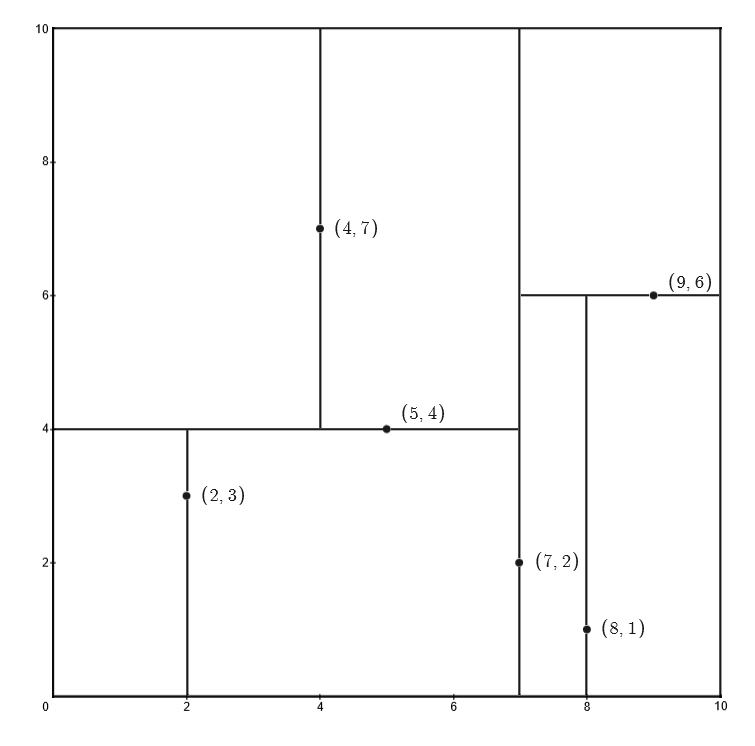
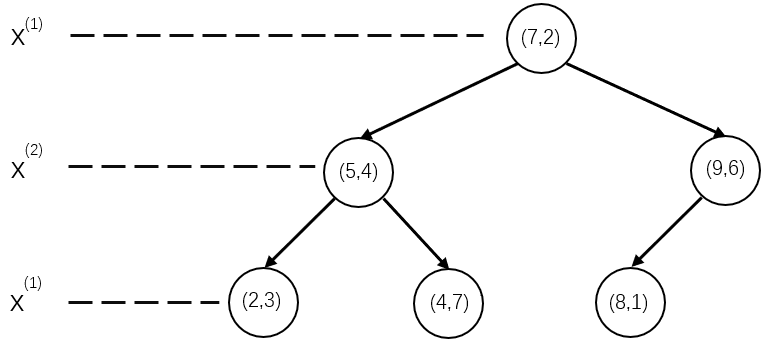
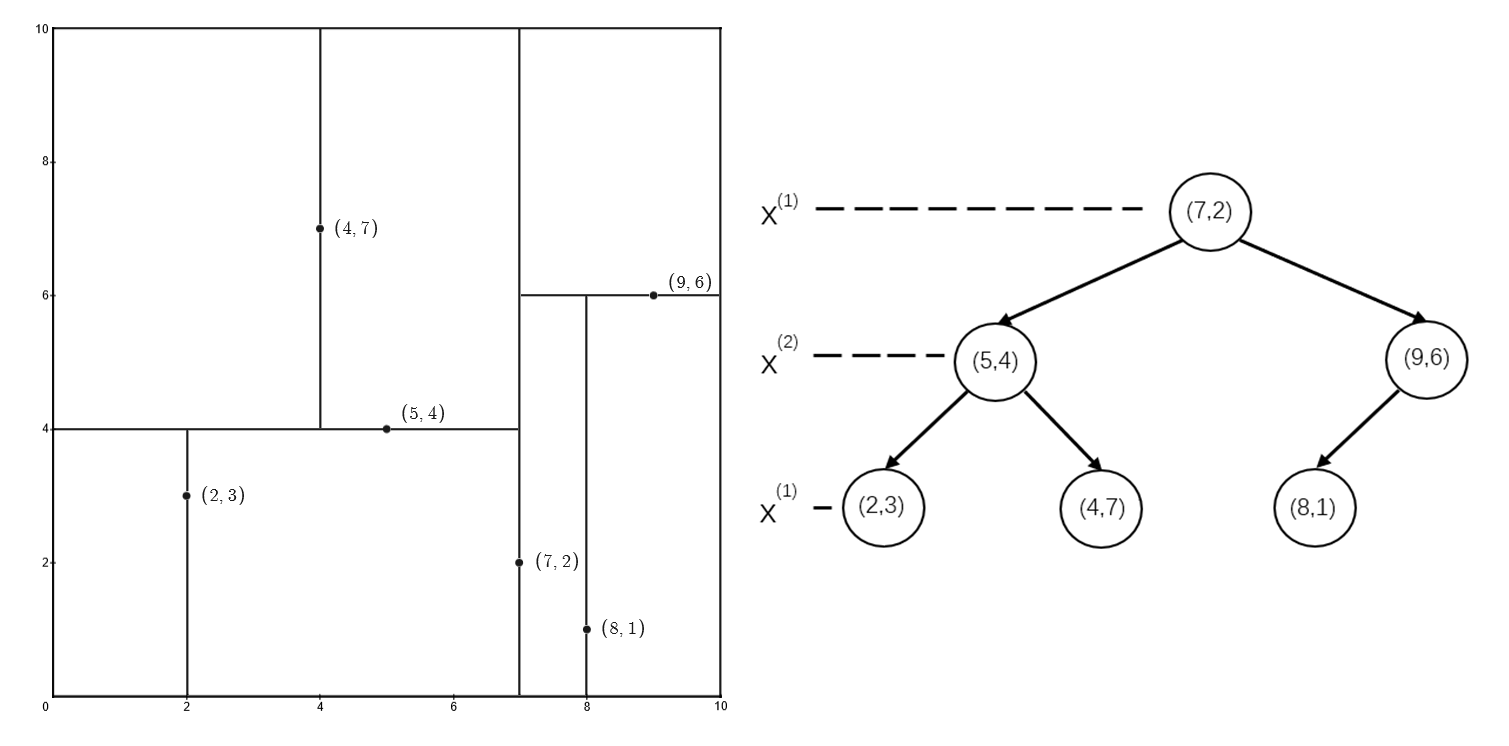
此时,特征空间划分完毕,根据特征空间划分可生成如下图所示的 KD 树
【KD 树的搜索】
基本思想
对于指定目标点,在 KD 树上寻找该目标点的最近邻时,其基本思想是:找到包含目标点的叶结点,然后从该叶结点出发,依次退回到父结点,在退回的过程中,不断查找与目标点最近邻的结点,当确定不可能存在更近的结点时终止
在上述过程中,包含目标点的叶结点对应包含目标点的最小超矩形区域,故而以该叶结点的样本点作为当前最近点,同时,目标点的最近邻一定是以目标点为中心,并且通过当前最近点的超球体内部
在返回当前结点的父结点时,若父结点的另一子结点的超矩形区域与超球体相交,那么就在相交的区域内寻找与目标点更近的样本点,若存在更近的样本点,就将该结点作为新的当前最近点,之后转到更上一级的父结点,重复上述过程
在返回当前结点的父结点时,若父结点的另一子结点的超矩形区域与超球体不相交,或不存在比当前点更近的点,则停止搜索
这样搜索就被限制在空间的局部区域上,效率得到极大的提高
算法流程
对于给定的数据集 $T=\{\mathbf{x_1},\mathbf{x_2},…,\mathbf{x_n}\}$,第 $i$ 组样本中的输入 $\mathbf{x_i}$ 具有 $m$ 个特征值,即:$\mathbf{x_i} =(x_i^{(1)},x_i^{(2)},…,x_i^{(m)})\in \mathbb{R}^m$,在构造完 KD 树后,求目标点 $\mathbf{x}$ 的最近邻的算法流程如下:
Step 1:从 KD 树的根结点出发,按如下步骤递归地寻找包含目标点 $\mathbf{x}$ 的叶结点
1)若目标点 $\mathbf{x}$ 当前维的坐标小于切分点的坐标,移动到左子结点
2)若目标点 $\mathbf{x}$ 当前维的坐标大于切分点的坐标,移动到右子结点
3)直到子结点为叶结点停止
Step 2:以 Step 1 中寻找到的叶结点为当前最近点
Step 3:按如下步骤递归地从叶结点向上回溯,对每个结点进行以下操作:
1)若该结点保存的样本点比当前最近点距离目标点更近,将该样本点作为当前最近点
2)当前最近点一定存在于该结点的某个子结点所对应的区域,检查该子结点的兄弟结点对应的区域是否有更近的点
a)该区域是否与以目标点为球心、以目标点与当前最近点的距离为半径的超球体相交
b)若相交,可能在该兄弟结点对应的区域内存在距目标点更近的点,移动到该兄弟结点中,接着向上递归
Step 4:当回溯到根结点时,搜索结束,最后的当前最近点,即为 $\mathbf{x}$ 的最近邻点
实例
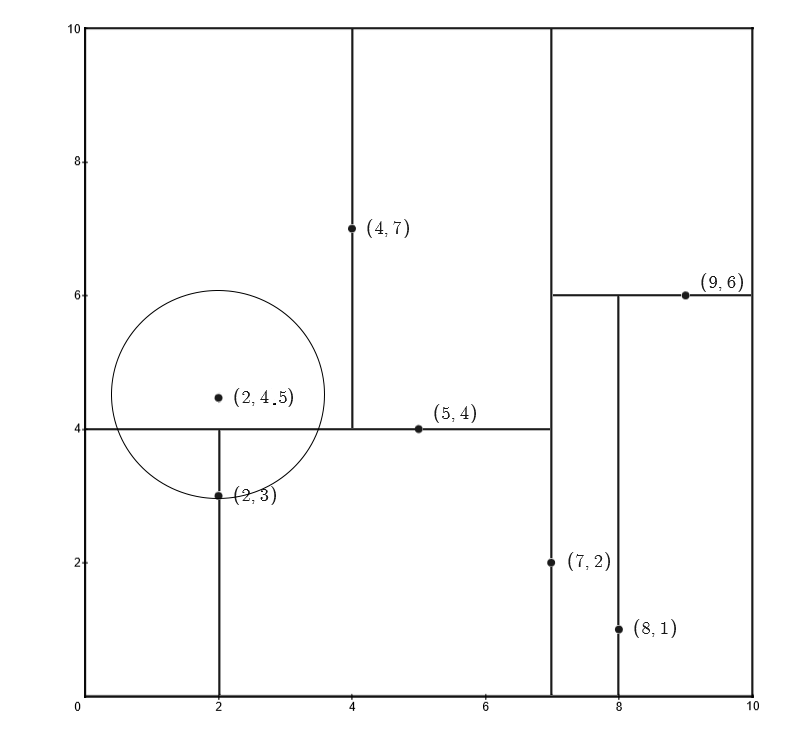
以下例所示的 KD 树为例,假设求输入的目标点 $(2,4.5)$ 的最近邻
对于输入的目标点 $(2,4.5)$ 其落于叶结点 $(4,7)$ 上,将 $(4,7)$ 作为最近邻点,计算到该样本点的欧式距离,并将其作为最近距离,即:
在从叶结点向上回溯时,路径为:$(4,7)\rightarrow(5,4)\rightarrow(7,2)$
输入样本点 $(2,4.5)$ 与 $(4,7)$ 的父结点 $(5,4)$ 的欧式距离为:
该距离小于 $d_{min}=3.2$,这就意味着叶结点 $(4,7)$ 作为最近邻点不成立,此时更新最近距离为 $d_{min}=3.04$,同时以 $(5,4)$ 作为最近邻点
之后,以输入样本点 $(2,4.5)$ 为圆心,以 $d_{min}=3.04$ 为半径做圆
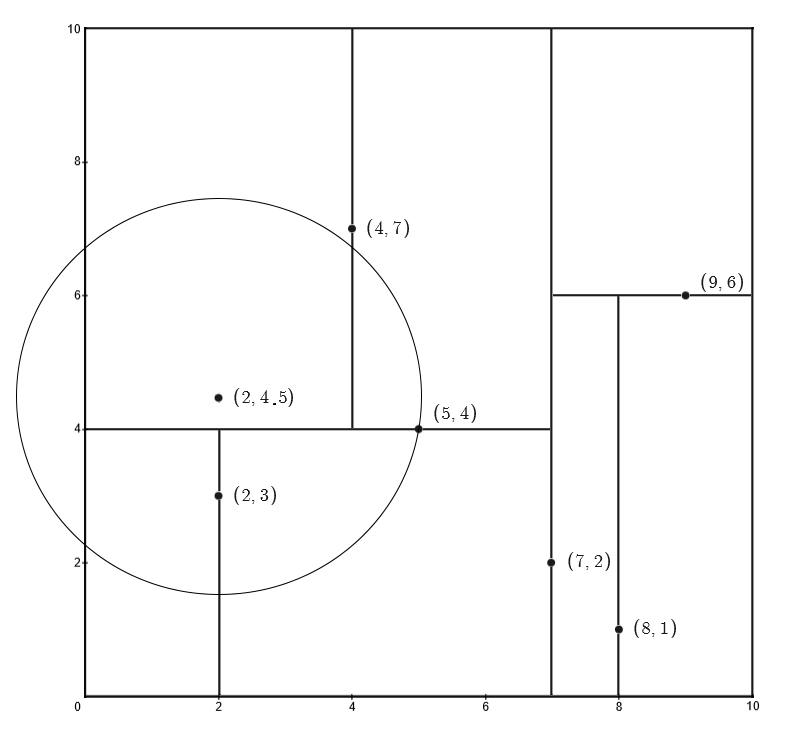
圆跟 $(5,4)$ 所切分的两个子区域相交,因此需要检查 $(5,4)$ 的另外一个子树的叶结点 $(2,3)$
输入样本点 $(2,4.5)$ 与叶结点 $(2,3)$ 的欧式距离为:
该距离小于 $d_{min}=3.04$,更新最近距离 $d_{min}=1.5$,并令 $(2,3)$ 为最近邻点
之后,回溯到根结点 $(7,2)$,由上图可以确认 $(7,2)$ 与切分的右子区域无关,回溯结束,$(2,3)$ 为最近邻点