Reference
【概述】
牛顿法(Newton Method)又称牛顿迭代法,其是梯度下降法的进一步发展,是求解非线性优化问题的常用方法
梯度下降法利用目标函数的一阶偏导数信息,以负梯度方向作为搜索方向,仅考虑了目标函数在迭代点的局部性质,得到的仅是局部最优解(关于梯度下降法,详见:梯度下降法)
牛顿迭代法在梯度下降法的基础上,进一步利用了目标函数的二阶偏导数,这样就考虑了梯度变化的趋势,能够更加全面地确定合适的搜索方向以加快收敛,其具二阶收敛快速的特点
但牛顿迭代法对目标函数有着较为严格的要求,即函数必须具有连续的一、二阶偏导数,海森矩阵(Hessian Matrix)必须正定,此外,其每一步除了计算梯度外,还需要计算目标函数的海森矩阵与其逆矩阵,计算复杂、存储量大,以维数 $N$ 的平方比增加
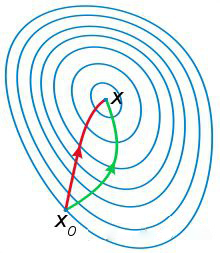
牛顿迭代法是二阶收敛,梯度下降法是一阶收敛,因此牛顿迭代法要比梯度下降法更快
如下图,红色路径代表牛顿迭代法,绿色路径代表梯度下降法
【牛顿迭代法的基本原理】
牛顿迭代法的原理,是使用函数 $f(x)$ 的泰勒级数,来寻找方程 $f(x)=0$ 根的个数
将 $f(x)$ 在 $x_0$ 处展开成泰勒级数,有:
取其线性部分的前两项,作为 $f(x)$ 的近似,即用 $f(x_0)+f’(x_0)(x-x_0)=0$ 的解来近似 $f(x)=0$ 的解
取 $x=x_1$,有:
由于对 $f(x)$ 的近似只是一阶展开,因此 $x_1$ 并非 $f(x)=0$ 的解,只能说 $f(x_1)$ 比 $f(x_0)$ 更加接近于 $0$
因此,考虑迭代求解:
由于最开始是选用 $f(x_0)+f’(x_0)(x-x_0)=0$ 来进行近似,其本质是过点 $(x_0,f(x_0))$ 做曲线 $y=f(x)$ 的切线 $L:y=f(x_0)+f’(x_0)(x-x_0)$,近似解 $x_1=x_0-\frac{f(x_0)}{f’(x_0)}$ 为 $L$ 与 $x$ 轴交点的横坐标
将上述过程进行推广,可以发现牛顿迭代法实质就是在曲线 $y=f(x)$ 上不断绘制点 $x_i$ 处的切线,来逼近 $f(x)$ 的解
迭代过程可参考下图
【海森矩阵与牛顿方向】
对于无约束极小化问题:
其中,$\mathbf{x}=(x^{(1)},x^{(2)},…,x^{(n)})^T\in \mathbb{R}^n$,$x^{(i)}$ 为向量 $\mathbf{x}$ 的第 $i$ 个分量
首先考虑 $n=1$ 的简单情形,此时 $\mathbf{x}=x$
设 $x_k$ 为当前的极小点估计值,使用牛顿迭代法进行求解,即在当前极小点估计值 $x_k$ 的附近对 $f(x)$ 做二阶泰勒展开,进而找到极小点的下一个估计值,有:
由于求的是最值,根据极值必要条件,$\varphi(x)$ 应满足:
即:
进而有:
于是,若给定初始值 $x_k$,则可构造如下的迭代格式:
产生序列 $\{x_k\}$ 来逼近 $f(x)$ 的极小点
对于 $n>1$ 的情景,设 $\mathbf{x_k}$ 为当前的极小点估计值,此时利用多元函数的二阶泰勒展开式,有:
其中,$\triangledown f$ 为 $f$ 的梯度向量,$\triangledown^2f$ 为 $f$ 的二阶偏导数构成的方阵,描述了函数的局部曲率,被称为海森矩阵(Hessian matrix)
$\triangledown f$ 与 $\triangledown^2f$ 中的元素均为关于 $\mathbf{x}$ 的函数,将 $\triangledown f(\mathbf{x_k})$ 和 $\triangledown^2 f(\mathbf{x_k})$ 简记为 $\boldsymbol{g_k}$ 和 $H_k$,表示 $\mathbf{x}$ 取当前极小点估计值 $\mathbf{x_k}$ 后得到的梯度向量和海森矩阵
同样的,根据极值必要条件,$\varphi(\mathbf{x})$ 应满足:
即:
若海森矩阵 $H_k$ 为非奇异矩阵(矩阵可逆),则有:
由此,若给定初值 $x_0$,则可构造如下的迭代格式:
记:
$\boldsymbol{d_k}$ 即为迭代过程中的迭代方向,被称为牛顿方向(Newton Direction),其是指向二次函数最优点的迭代方向,这个方向可正可负
【原始牛顿法】
原始牛顿迭代法即最原始的牛顿法(Newton Method),即在每次迭代时,迭代方向取牛顿方向 $\boldsymbol{d_k}$,每次迭代令 $\mathbf{x_{k+1}}=\mathbf{x_k}+\boldsymbol{d_k}$ 即可
下面给出原始牛顿法的完整算法描述:
- 给定初值 $\mathbf{x_0}$ 和精度阈值 $\varepsilon$,并令 $k=0$
- 计算凸函数 $f(\mathbf{x})$ 的梯度向量 $\boldsymbol{g_k}$ 和海森矩阵 $H_k$
- 若梯度向量的 L1 范数 $||\boldsymbol{g_k}||$ 满足 $||\boldsymbol{g_k}||<\varepsilon$,则停止迭代,否则执行步骤 4
- 根据牛顿方向 $\boldsymbol{d_k}=-H_k^{-1}\cdot \boldsymbol{g_k}$,计算新的迭代点 $\mathbf{x_{k+1}}=\mathbf{x_k}+\boldsymbol{d_k}$
- 令 $k=k+1$,转至步骤 2
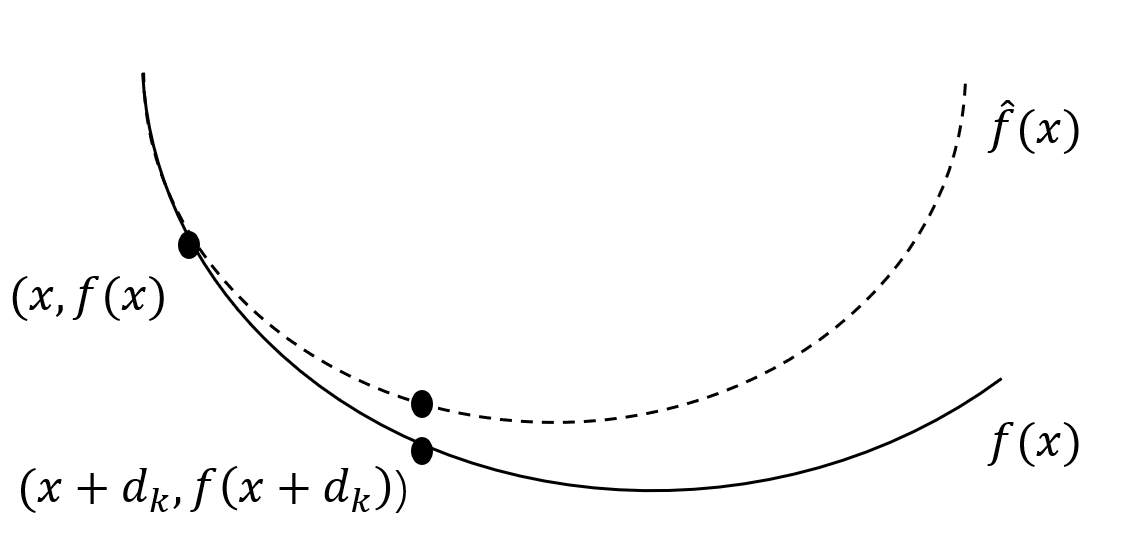
如下图所示,实线是目标函数 $f(x)$,虚线是 $f(x)$ 在点 $x$ 处的二阶泰勒展开
由于牛顿方向 $\boldsymbol{d_k}$ 可正可负,那么就需要知道在满足什么条件下牛顿法的迭代方向是下降的
首先给出下降方向(Descent Direction)的定义:
设 $f:\mathbb{R}^n\rightarrow \mathbb{R}^1$ 在点 $x$ 处可微,若存在 $\mathbf{p} \in \mathbb{R}^n$,使得:
则向量 $\mathbf{p}$ 是 $f$ 在 $x$ 处的下降方向
那么,在判断牛顿法的牛顿方向是否向函数值下降的方向移动时,就是判断迭代方向和当前点的梯度值做内积,即:
若想让 $\boldsymbol{d_k} \cdot \boldsymbol{g_k}^T<0$,也就是令 $H_k^{-1} \cdot \boldsymbol{g_k} \cdot \boldsymbol{g_k}^T > 0$,即:
可以发现,这恰好是海森矩阵正定的条件
也就是说,如果想要牛顿方向朝函数值下降的方向移动,就需要当前点的海森矩阵是正定的,而这个要求是极强的
因此,当目标函数是二次正定函数时,由于二阶泰勒展开函数与原目标函数不是近似,而是完全相同的二次式,此时海森矩阵 $H_k$ 退化为一个常数矩阵,从任意一初始点出发,利用迭代式 $\mathbf{x_{k+1}}=\mathbf{x_k}-H_k^{-1}\cdot \boldsymbol{g_k}$ 只需迭代一次即可达到 $f(x)$ 的极小值点 $x^*$
而当目标函数非二次函数,若函数的二次性态较强,或迭代点已进入到最优点的较小邻域,则其收敛速度同样很快;反之,则可能会出现函数值可能会上升的情况,即 $f(\mathbf{x_{k+1}})>f(\mathbf{x_k})$,在严重的情况下,甚至会导致迭代点列 $\{\mathbf{x_k}\}$ 的发散,以至于计算失败,这表明原始牛顿法不能保证迭代方向一定沿函数值下降方向
【阻尼牛顿法】
为解决原始牛顿法不能保证迭代方向一定沿函数值下降方向的问题,出现了阻尼牛顿法(Damped Newton’s Method)
在梯度下降法中,介绍了学习率 $\alpha$,即迭代步长,但在原始牛顿迭代法中,没有迭代步长这个概念,或者说在确定迭代方向后,迭代步长恒为 $1$
阻尼牛顿法是确定迭代方向后,继续在该方向进行一维搜索(Line Search),寻找在该迭代方向上最优的迭代步长 $\lambda$
阻尼牛顿法的牛顿方向与原始牛顿法一致,仍为 $\boldsymbol{d_k}=-H_k^{-1}\cdot \boldsymbol{g_k}$,寻找的迭代步长为:
在引入步长因子 $\lambda_k$ 后,迭代式就变为:
下面给出阻尼牛顿法的完整算法描述:
- 给定初值 $x_0$ 和精度阈值 $\varepsilon$,并令 $k=0$
- 计算凸函数 $f(\mathbf{x})$ 的梯度向量 $\boldsymbol{g_k}$ 和海森矩阵 $H_k$
- 若梯度向量的 L1 范数 $||\boldsymbol{g_k}||$ 满足 $||\boldsymbol{g_k}||<\varepsilon$,则停止迭代,否则确定搜索方向 $\boldsymbol{d_k}=-H_k^{-1}\cdot \boldsymbol{g_k}$
- 利用 $\lambda_k=\arg \min\limits_{\lambda\in \mathbb{R}} f(\mathbf{x_k}+\lambda \boldsymbol{d_k})$ 得到迭代步长 $\lambda_k$
- 令 $\mathbf{x_{k+1}}=\mathbf{x_k}- \lambda_k \boldsymbol{d_k}$
- 令 $k=k+1$,转至步骤 2
需要注意的是,无论是原始牛顿法还是阻尼牛顿法,均涉及到 $H_k^{-1}$ 的计算,在实际应用中,为追求效率,通常不直接对 $H_k$ 求逆,而是将其转换为求解线性方程组 $H_k \boldsymbol{d_k} = -\boldsymbol{g_k}$,此时可根据海森矩阵的性态来选择合适的迭代法,例如:预条件共轭梯度法(PCG)、代数多重网格法(AMG)等

