【实现实时调度的基本条件】
提供必要的信息
为实现实时调度,系统应向调度程序提供有关任务的下述信息:
- 就绪时间:任务成为就绪状态的起始时间
- 开始截止时间与完成截止时间:对于典型的实时任务,只需知道开始截止时间,或完成截止时间
- 处理时间:一个任务从开始执行到完成的时间
- 资源要求:任务执行时所需的一组资源
- 优先级:若某任务的开始截止时间错过,会引起故障,则应为该任务赋予绝对优先级;若任务的开始截止时间错过,对任务进行无重大影响,则可为其赋予相对优先级
系统处理能力强
处理能力不足可能会出现某些实时任务不能得到及时处理,导致难以预料的后果。
假定系统中有 m 个周期周期性的硬实时任务,处理时间为 $C_i$,周期时间为 $P_i$,则在单机系统中有:
提高系统处理能力的途径有两种:
- 采用单处理机系统:增强处理能力,显著地减少对每一个任务的处理时间
- 采用多处理机系统:采用多机系统时,假定有 $N$ 个处理器,则有限制条件 $\sum_\limits{i=1}^m \frac{C_i}{P_i} \leq N$
调度机制
实时任务分为两种:
- 硬实时任务:必须满足任务对截止时间的要求
- 软实时任务:联系着一个截止时间,但不严格,可偶尔错过,不会对系统造成太大影响
对于硬实时任务来说,应采用抢占机制,这样即可满足其对截止时间的要求
对于小的实时任务来说,如能预知任务的开始截止时间,为简化调度程序和对任务调度时所花费的系统开销,可采用非抢占调度机制
具快速切换机制
为保证硬实时任务能及时运行,在系统中应具有快速切换机制,使之能进行任务的快速切换,该机制具有以下两方面的能力:
- 对外部中断的快速响应能力:利用快速硬件中断机构,可在紧迫的外部事件请求中及时响应
- 快速的任务分派能力:使系统中的运行功能单位适当的小,提高切换速度
【实时调度算法的分类】
非抢占式调度算法
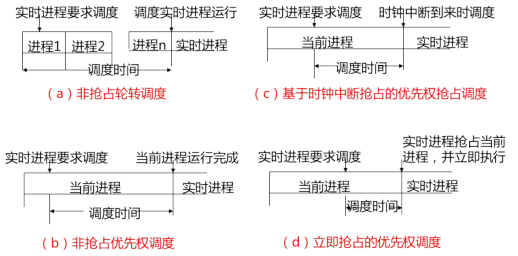
非抢占式调度算法比较简单,常用于一些小型实时系统或要求不严格的实时系统中,根据采用的算法不同,分为以下两种:
- 非抢占式轮转调度算法:常用于工业生产的群控系统中,要求不太严格
- 非抢占式优先调度算法:常用于有一定要求的实时控制系统中,要求相对严格
抢占式调度算法
在较严格的实时系统中,常选择抢占式优先权调度算法,根据抢占发生时间的不同,分为以下两种:
- 基于时钟:高优先级任务到达后并不立即抢占,而等下一个时钟中断时抢占
- 立即抢占:一旦出现外部中断,只要当前任务未处于临界区,就立即抢占处理机
【常用调度算法】
最早截止时间优先算法
最早截止时间优先(Earliest Deadline First,EDF)算法,根据任务截止时间来确定任务的优先级,任务的截止时间越早,其优先级越高
系统会保持一个实时任务就绪队列,队列按照各任务截止时间的早晚进行排序,调度程序总会选择就绪队列中的第一个任务,分配处理机使其投入运行
新任务产生时,根据系统是否允许等待当前程序执行完而采用抢占式、非抢占式调度方法
该算法可能会导致作业错过,因此常用于软实时系统
最低松弛度优先算法
最低松弛度优先(Least Laxity First,LLF)算法,根据任务的紧急(或松弛)程度来确定优先级,任务的紧急程度越高(或松弛度越小),优先级就越高
松弛度,是当前时刻到开始截止时间间的差距,随着时间的推进,这个差值会逐渐变小,任务也就越来越紧迫,优先级也就越高
对于最低松弛度优先算法来说,其进程发生切换的时机有:进程执行完、进程 I/O 阻塞、新进程出现时可能的抢占、某进程松弛度为 0 时发生抢占,需要注意的是,有的时刻,其他并发的实时任务下一周期未到来,会出现只有一个任务的情况

