【概述】
随着机器学习、深度学习的发展,语音、图像、自然语言处理逐渐取得了很大的突破,语音、图像、文本都是简单的序列或网格数据,深度学习很擅长处理该类的结构化数据
但现实世界中并非所有事物都是结构化数据,即并非都可以表示为一个序列或者一个网络,例如社交网络、知识图谱、复杂的文件系统等
相比于简单的文本、图像,这种网络类型的非结构化数据十分复杂,处理这类数据的难点包括:
- 图的大小是任意的,且拓扑结构复杂,没有像图像一样的空间局部性
- 图没有固定的结点顺序,即没有一个参考结点
- 图通常是动态图,且包括多模态特征
针对这类非结构化数据的处理和建模,Franco Scarselli 等人首次在《The Graph Neural Network Model》中提出了图神经网络(Graph Neural Network Model,GNN),将神经网络应用在图数据结构上,并详细叙述了网络模型的结构组成、计算方法、优化算法、流程实现等
其基本思想是基于信息传播机制,在每一个结点通过相互交互信息来更新自己的结点状态,直到达到某一稳定值,输出就是在每个结点处,根据当前结点状态分别计算输出
【图领域应用】
对于机器学习中的图领域问题,假设函数 $\tau$ 是一个将图 $G$ 和图中一个结点 $n$ 转换为一个实值 $m$ 维向量的函数:
那么机器学习的任务就在于从已知样本中学习得到这样的函数
图领域的应用主要可以分为两种类型:
- 专注于图的应用(Graph-focused):函数 $\tau$ 和具体的结点无关,即 $\tau(G)$,训练时在图数据集中进行分类或回归
- 专注于结点的应用(Node-focused):函数 $\tau$ 依赖于具体的结点 $n$,即 $\tau(G,n)$,分类或回归取决于每个结点的属性
如下图所示:
- 图 a 是化学分支结构,能够用图 $G$ 表示,函数 $\tau(G)$ 可能用于估计这种化学分子对人有害的概率,因此不关注分子中具体原子(结点),所以属于 Graph-focused
- 图 b 是城堡图片,图中每一种结构都由结点表示,函数 $\tau(G,n)$ 可能用于预测每一个结点是否属于城堡,所以属于 Node-focused
- 图 c 是网页分类,图中每一个网页都代表一个结点,函数 $\tau(G,n)$ 可能用于预测网页分类,所以属于 Node-focused

【模型】
符号假设
- 图 $G$ 表示为:$G(N,E)$,其中 $N$ 为结点集,$E$ 为边集
- $\text{ne}[n]$ 表示结点 $n$ 的邻居集合
- $\text{co}[n]$ 表示以结点 $n$ 为顶点的边集
- $\mathbf{l}_n\in \mathbb{R}^{l_N}$ 表示结点 $n$ 的特征向量
- $\mathbf{l}_{(n_1,n_2)}\in\mathbb{R}^{l_E}$ 表示边 $(n_1,n_2)$ 的特征向量
- $\mathbf{l}$ 表示所有特征向量堆叠在一起的向量
考虑图可以是位置图(Positional Graph)也可以非位置图(Non-positional Graph),对于位置图来说,对于每一个结点 $n$,都会给该结点的邻居结点 $u$ 赋予一个位置值 $v_n(u)$,该值是一个单射函数,即:
假设存在一个图-结点对的集合 $\mathcal{D}=\mathcal{G}\times \mathcal{N}$,$\mathcal{G}$ 为图的集合,$\mathcal{N}$ 为结点集合,那么图领域问题可以表示为有如下数据集的监督学习框架:
其中,$n_{ij}\in N_i$ 表示集合 $N_i \in \mathcal{N}$ 中的第 $j$ 个结点,$\mathbf{t}_{ij}$ 表示结点 $n_{ij}$ 的期望目标(标签),$p\leq |\mathcal{G}|,q_{i}\leq |\mathcal{N_i}|$
模型表示
对于图中的结点 $n$,其状态用 $\mathbf{x}_n\in \mathbb{R}^s$ 表示,输出用 $\mathbf{o}_n$ 表示,那么状态和输出可以表示为:
其中,$f_w$ 被称为局部转移函数(Local Transition Function),其表达了结点对其领域的依赖关系,$g_w$ 被称为局部输出函数(Local Output Function),其描述了输出如何产生的,$\mathbf{l}_n$ 是结点 $n$ 的特征向量,$\mathbf{l}_{\text{co}[n]}$ 是以结点 $n$ 为顶点的边的特征向量,$\mathbf{x}_{\text{ne}[n]}$ 是结点 $n$ 的邻居结点的状态,$\mathbf{l}_{\text{ne}}[n]$ 是结点 $n$ 的邻居结点的特征向量
令 $\mathbf{x},\mathbf{o},\mathbf{l},\mathbf{l}_N$ 表示所有结点的状态、输出、特征向量、所有结点特征向量叠加构造的向量,那么上式可写为:
其中,$F_w$ 被称为全局转移函数(Global Transition Function),$G_w$ 被称为全局输出函数(Global Output Function),分别是 $|N|$ 个 $f_w$ 和 $g_w$ 的叠加
综上可以发现,要实现 GNN 模型,必须提供以下三项:
- 求解状态 $\mathbf{x}_n$ 和输出 $\mathbf{o}_n$ 的方法
- 学习算法
- 转换和输出功能的实现,即局部转移函数 $f_w$ 和局部输出函数 $g_w$
状态计算
根据 Banach 的不动点理论,假设 $F_w$ 是一个压缩映射函数,那么上式有唯一不动点解,且可以通过迭代方式逼近该不动点
其中,$\mathbf{x}(t)$ 表示 $\mathbf{x}$ 在第 $t$ 个迭代时刻的值
对于任意初值,迭代的误差是以指数速度减小的,使用迭代的形式可以写出状态和输出的更新表达式:
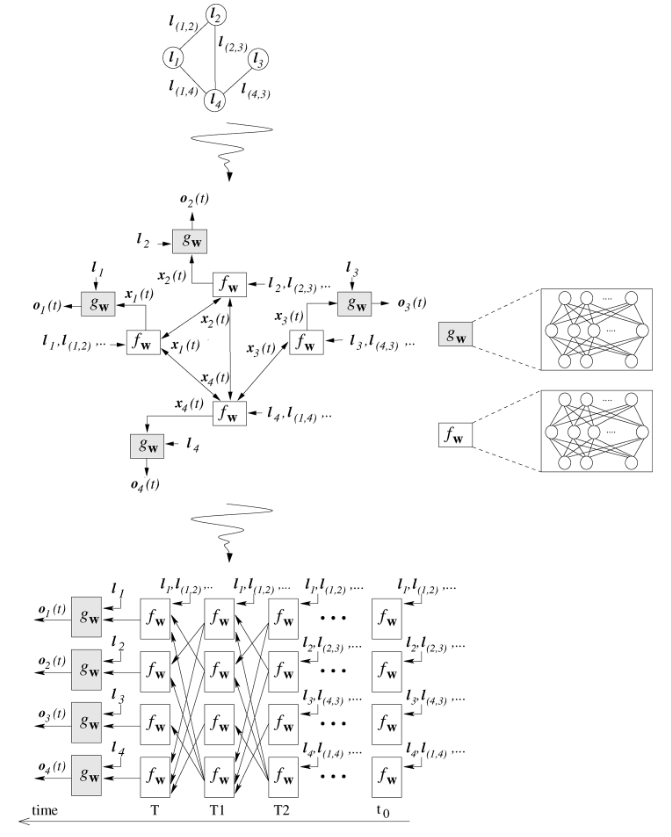
上述的更新表达式可以理解为由单元组成的网络表示,这样的网络被称为编码网络(Encoding Network)
为构建编码网络,图中的每个结点被函数 $f_w$ 的单元代替,每个单元存储当前结点 $n$ 的状态 $\mathbf{x}_n(t)$,在激活时,利用结点的特征向量和邻居结点中的信息去计算新的状态 $\mathbf{x}_n(t+1)$,结点 $n$ 的输出由另一个单元 $g_w$ 产生
如下图所示,顶端的图是原始图,中间的图表示状态向量和输出向量的计算流图,底端的图表示将更新流程迭代 $T$ 次并展开后得到的等效网络图
学习算法
GNN 的学习就是估计参数 $w$,使得函数 $\varphi_w$ 能够近似估计训练集:
其中,$q_i$ 是图 $G_i$ 中监督学习的结点个数,对于 Graph-focused 的任务,需要增加一个特殊结点 $q_i=1$,该结点用于作为目标结点,从而使得 Graph-focused 任务和 Node-focused 任务统一到结点预测任务上
学习任务可以表示为如下的二次损失函数的最小化:
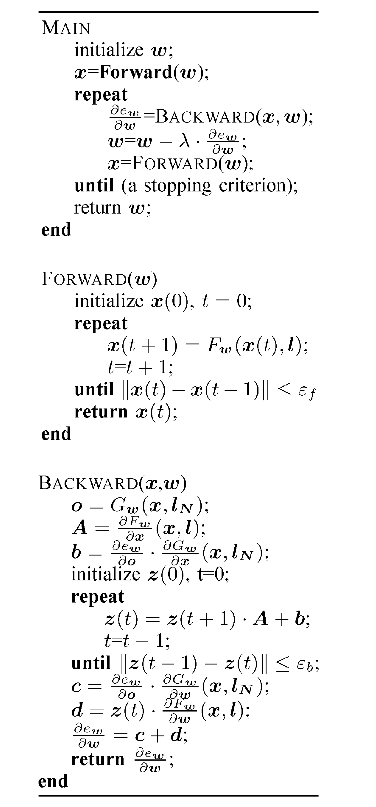
优化算法基于随机梯度下降法,按照如下步骤进行:
- 按照迭代方程进行迭代,更新状态 $\mathbf{x}_n(t)$,直到 $T$ 时刻逼近不动点解 $\mathbf{x}(T)\approx \mathbf{x}$
- 计算参数权重的梯度 $\frac{\partial e_w(T)}{\partial w}$
- 根据梯度更新权重
算法流程图如下,其中 FORWARD 用于迭代计算出收敛点,BACKWARD 用于计算梯度
转换和输出功能
在 GNN 中,局部输出函数 $g_w$ 不需要满足特定约束,直接使用多层前馈网络即可,而局部转移函数 $f_w$ 由于需要满足压缩映射的条件,且与不动点计算相关,因此需要着重考虑
Linear GNN
对于结点状态的计算,将 $\mathbf{x}_n = f_w(\mathbf{l}_n,\mathbf{l}_{\text{co}[n]},\mathbf{x}_{\text{ne}[n]},\mathbf{l}_{\text{ne}[n]})$ 中的 $f_w$ 改为如下形式:
相当于是对结点 $n$ 的邻居结点使用函数 $h_w$,并将得到的值求和作为结点 $n$ 的状态,由此,可按如下方式实现:
其中,向量 $\mathbf{b}_n\in \mathbb{R}^s$,矩阵 $A_{nu}\in \mathbb{R}^{s\times s}$,定义为两个前馈神经网络的输出
更准确来说,产生矩阵 $A_{nu}$ 的前馈网络是过渡网络(Transition Network),产生向量 $\mathbf{b}_n$ 的前馈网络是强迫网络(Forcing Network)
由于过渡网络 $\phi_w$ 和强迫网络 $\rho_w$ 分别可以表示为:
那么由此就可以定义矩阵 $A_{nu}$ 和向量 $\mathbf{b}_n$,即:
其中,$\mu\in (0,1),\Xi=\text{resize}(\phi_w(\mathbf{l}_n,\mathbf{l}_{(n,u)},\mathbf{l}_u))$,$\text{resize}(\cdot)$ 表示将 $s^2$ 维向量 reshape 成 $s\times s$ 的矩阵
简单来说,就是将过渡网络的输出 reshape 成方形矩阵,然后乘以一个系数 $\frac{\mu}{s| \text{ne}[u] |}$ 即得到矩阵 $A_{nu}$,向量 $\mathbf{b}_n$ 直接就是强迫矩阵的输出
Non-linear GNN
对于非线性 GNN 来说,$h_w$ 通过多层前馈网络实现,但不是所有的参数 $w$ 都会被使用,因为需要保证 $F_w$ 是一个压缩映射函数,这可以通过惩罚项来实现:
其中,惩罚项 $L(y)$ 在 $y>\mu$ 时为 $(y-\mu)^2$,在 $y\leq \mu$ 时为 $0$,参数 $\mu\in(0,1)$ 被定义为期望的 $F_w$ 的压缩系数

